Касательно механики: Блок будет достаточно резво поворачиваться, за этим проблемы не станет. Касательно
червясной передачи: ИМХО, не пойдет, ибо как раз скорость мала.
Несмотря на преимущества в виде отсутствия инерции и большого момента. Пузырь
привел ИМХО очень и очень стройную схему прицеливания по летящим целям.
Надо продумать, но концепция красивая. Кросавчег, что и говорить!
Puzir 28-08-2008 14:59
Спасибо
Я тут другое прикинул, если мы возьмем штангу для выносной камеры
длиной см 20, то для адекватного измерения расстояния нам придется
определять угол поворота камеры с точностью до нескольких минут, что
ИМХО непросто.
Crowkiller 28-08-2008 16:36
quote:Originally posted by Puzir: Можно
после захвата цели вести ее немного времени, записывая его положение в
каждом кадре, после нескольбких замеров строим прямую, берем по ней
поправку (ну можно и усредненную, чтоб со скоростью не связываться, кар
на лету определяется как "пятно" поэтому нам не нужно будет знать
расстояние, да и поправки меньше зоны поражения будут) Установка
перестает вести цель и дает очередь избыточной длины в найденую точку Ну как на картинке кар-черная точка, раньше он был в серых, а будет в прицеле
Гы, сейчас посмотрел предидущую схему-я то же самое нарисовал Просто когда читал посты был неадекватен
Все
таки лучше вести по прямым между положениями карра на соседних кадрах,
т.е. получится несколько прямых, касательных к кривой движения кара,
ааам ну как *CAD чертит кривые.
c00xer 28-08-2008 17:11
quote:Originally posted by Puzir: Я
тут другое прикинул, если мы возьмем штангу для выносной камеры длиной
см 20, то для адекватного измерения расстояния нам придется определять
угол поворота камеры с точностью до нескольких минут, что ИМХО
непросто.
А говорилось ведь уже, что
бинокулярное зрение и робототехника несовместимы. И в погоне за
дешевизной системы мы можем запросто её угробить. Дальномер нужен
"человеческий", т.е. лазерный или ультразвуковой (а вдруг?), способный
работать вне помещения и имеющий выход RS-232.
c00xer 28-08-2008 17:13
Потом, не надо забывать, что компьютер будет и без того лихо загружен, а бинокулярная система его просто добьёт.
Crowkiller 28-08-2008 17:17
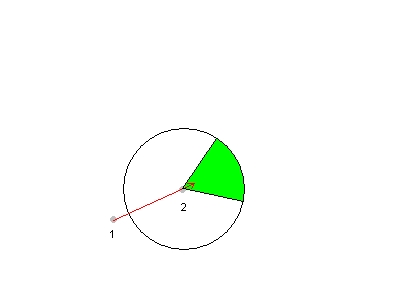
А вот идея ради снижения загрузки:
1-карр попал в кадр и успешно распознан 2-положение кара на следующем кадре
Направление полета кара уже есть. В следующем кадре в первую очередь ищем кара в зеленом секторе, если не нашли там-в круге
Puzir 28-08-2008 17:27
А в чем собственно
выражается несовместимость если не говорить о нагрузке на комп ?
Кстати, вопросик, существуют ли точные недорогие электронные
динамометры?
c00xer 28-08-2008 17:45
Несовместимость - в точности определения угла. А динамометр... Зачем он в нашей системе? Не знаю, может и существуют.
Puzir 28-08-2008 18:01
Мы не можем определить угол поворота именно как угол... вот
Вешаем камеру на привод с червячной передачкой (скорость там не нужна,
вращение в пределах нескольких градусов) он обеспечит необходимое
усилие точность и стабильность положения. На шестерню, которая служит
платформой камеры крепим снизу шкив и натягиваем тросик с динамометром,
снимаем усилие . Можно крепить динамометр через пружину, если ход...
крючка самого прибора мал (на электронном скорее всего так и будет).
Собственно угол нам знать и ненадо. Установку можно настроить наводя
камеры на мишени на разном удалениии и записывать показания прибора,
соответствующие дистанции. Нагрузку на комп это увеличить не должно
особо, камера будет искать цель в очень малом секторе, ведь сама турель
уже будет следить за каром.
c00xer 28-08-2008 18:16
Не понял функцию
динамометра в этой конструкции. Узнать координату, скорость или
ускорение? Может, просто на червяк посадить многооборотный резистор?
Puzir 28-08-2008 18:59
Вот схемку накидал Снятые с динамометра показания (он квадратик )
будут сравниваться с данными по дистанциям, полученными при настройке
прибора таким образом мы сможем узнать расстояние тк мы определяем
дистанцию только в наземном положении мы не будем так жестко ограничены
по времени, к тому же нам будет уже известно, что в прицеле кар (его
обнаружит камера наведения) и вторую просто наведем на пятно, ведь
сектор, в котором предстоит искать будет мизерным
c00xer 28-08-2008 19:54
Здорово А всё-таки, чем многооборотник хуже?
Puzir 28-08-2008 19:57
Просто точность дикая нужна Если сможет обеспечить такую и не дороже моего варианта-почему бы и нет
Crowkiller 28-08-2008 21:28
обычный инкрементальный энкодер на оси проще и дешевле обычно они с 1024,2048 имп/об
Crowkiller 28-08-2008 21:30
либо можно вообще забить на это-тупо рулить шаговиком с драйвером в микрошаговом режиме, скорости и момента хватит
c00xer 28-08-2008 21:42
quote:Originally posted by Crowkiller: обычный инкрементальный энкодер на оси
Т.е. ромашка на оси и две оптопары, как в мышке? Так может, прямо из мышки и выдрать всё необходимое?
Crowkiller 28-08-2008 21:50
там обычно штрихи на прозрачном диске
а мышиный много импульсов на оборот не даст
хотя я не понимаю, чем так не нравится шаговик
Ivanych 28-08-2008 22:52
quote:Originally posted by Crowkiller: либо можно вообще забить на это-тупо рулить шаговиком с драйвером в микрошаговом режиме, скорости и момента хватит
Самое разумное. Очень точно можно отследить положение камеры в этом случае. Хотя енкодер "от мышки" тоже вещь и недорого совсем.
Crowkiller 28-08-2008 23:13
Взять шаговики с запасом по моменту(хотя хороший драйвер все равно не допустит пропуска шагов).
Puzir 29-08-2008 01:30
Не хочется ставить отдельный шаговый двигатель на камеру


 Первый многозарядный Filgun
Первый многозарядный Filgun
 Я тут другое прикинул, если мы возьмем штангу для выносной камеры
длиной см 20, то для адекватного измерения расстояния нам придется
определять угол поворота камеры с точностью до нескольких минут, что
ИМХО непросто.
Я тут другое прикинул, если мы возьмем штангу для выносной камеры
длиной см 20, то для адекватного измерения расстояния нам придется
определять угол поворота камеры с точностью до нескольких минут, что
ИМХО непросто.

 Просто когда читал посты был неадекватен
Просто когда читал посты был неадекватен